

Mars Rover
Meet Halley
Transforming Martian Mysteries Into Discoveries
The rover must be able to withstand harsh environments such as dust, rain, rough terrain, and wind while still being capable of accomplishing a variety of tasks like getting from point A to point B with accuracy, collecting soil, and analyzing its chemical structure, rescue a stranded astronaut, etc

Meet Our Team
On the team we have this slogan “Team Before Machine” or TBM for short. This short sentence reminds us of the purpose of this team which isn’t only to design cool robots, we want to design cool robots while having fun and creating long lasting bonds between our members and ensure that we all feel like part of the same big family.

92
Members
3rd in Traversal at CIRC 2024
14
Leads,PMs, Advisor
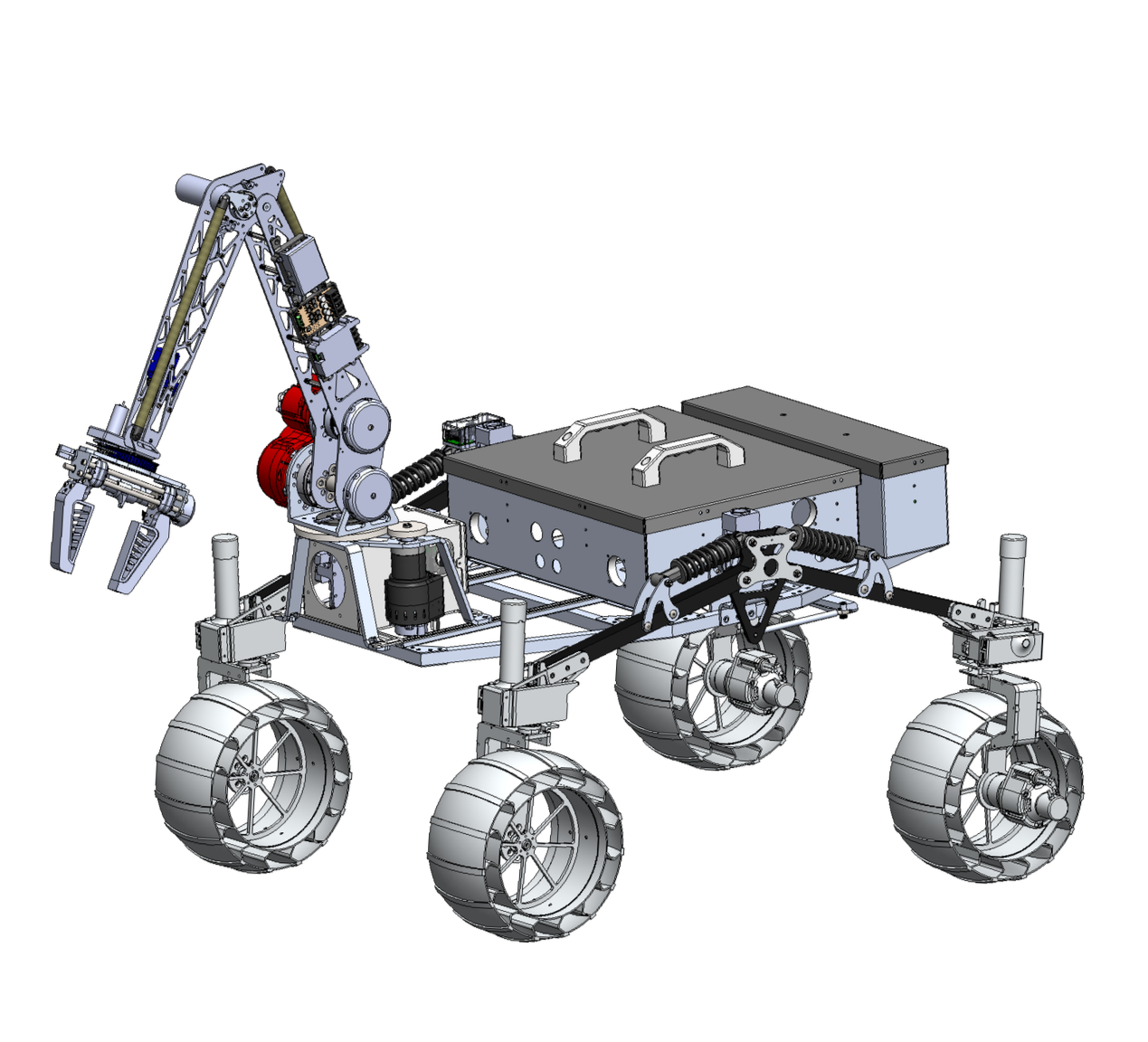
Halley
at a Glance
Power System
24V 17000mAH Tattu LiPo Batteries (x2)
Propulsion
Drive: EC 60 flat Ø60 mm, brushless, 200 W, with Hall sensors
Shoulder: EC 90 flat Ø90 mm, brushless, 360 W, with Hall sensors
Elbow: EC 60 flat Ø60 mm, brushless, 150 W, with Hall sensors
Waist: EC 60 flat Ø60 mm, brushless, 200 W, with Hall sensors
Wrist Pitch: 42mm High Torque Planetary Gear Motor w/ Encoder - 24V 13RPM
Wrist Roll: 22mm Planetary Gear Motor w/ 12V 18RPM Encoder
Navigation
Point Cloud Mapping
Probabilistic Roadmap
Computer Vision
Intel RealSense d435
USB Cameras
Embedded Systems
Teensy 4.0
Raspberry Pi
STM32 Nucleo
Compute Module
NVIDIA Jetson Orin Nano
Software Stack
ROS 2 Humble
Ubuntu 22.04 Jammy LTS
Python3, C++
Simulation Tools
Gazebo, Rviz
Unity
Modular Attachments
Soil Collection Module
5 Degrees of Freedom Arm
Halley
Mechanical Design.
In the mechanical division, we strive for continuous improvement of the structure of our rover. The designs undergo multiple iterations of CADing, prototyping, and testing before being implemented into the final product. Simulations also constitute an integral part of our design process to verify that the parts meet our requirements and ensure good integration with the work of other divisions. We use a variety of technologies, such as plastic and metal 3D printing, to optimize the functionality of our rover. Through the collective efforts of the whole division, we aim for maximum mobility, durability, and stability of our rover throughout the competition.

Halley
Electrical Design.
The Electrical Division focuses on wiring, controlling and powering the various subsystems on the rover, including Drive, Arm and Science. The Rover electrical box includes student designed PCBs and firmware to allow the different subsystems to function together seamlessly by communicating with the ROS Master (Jetson or RaspberryPi). Members on the electrical division develop their circuit design skills using Altium, through hole and SMT soldering skills and embedded software development skills under the supervision of the Project Manager, Technical Advisors and Electrical Leads, and work closely with the other divisions.

Halley
Software Design.
The software division is responsible for designing the human interface with the rover, enabling precise control over the rover and its arm through an intuitive interface. Next, they develop comprehensive simulations that test various systems such as drive, arm, cameras, etc. ensuring their reliability. Lastly, the team has recently begun developing a drive autonomy package, a sophisticated software solution that allows the rover to autonomously navigate obstacles and traverse terrains.

Halley
Science Box.
The next step in scientific development is here. Using our modular on board soil collection system, the Mars Rover can collect soil samples from areas of interest and conserve them for scientific analysis. Once the soil samples are retrieved, they are put through a series of tests to determine their composition. These results are instrumental in identifying the ideal location for a colony on Mars.

Meet the Rover Team
-
![]()
Tony Ozerov
PROJECT MANAGER
-
![]()
Shiuan Lee
MECHANICAL LEAD
-
![]()
Ella Godun
MECHANICAL LEAD
-
![]()
Helen Deng
SCIENCE LEAD
-
![]()
James Di Sciullo
ELECTRICAL LEAD
-
![]()
Ambroise Tauzia
ELECTRICAL LEAD
-
![]()
Sonia Ly
ELECTRICAL LEAD
-
![]()
Sebastian Estrada Encinas
SOFTWARE LEAD
-
![]()
Aerin Brown
SOFTWARE LEAD
-
![Tina Zhang]()
Tina Zhang
ADVISOR
-
![Julien Hacot-Slonosky]()
Julien Hacot-Slonosky
SCIENCE ADVISOR
-
![]()
Meriem Djafri
MECHANICAL ADVISOR
-
![]()
Aman Sidhu
SOFTWARE ADVISOR












Community & Outreach at McGill Robotics
McGill Robotics mission is to inspire students to build robots and to build robots that inspire students. We believe it is important to give back to the community which is why we are an organization that advances the field of robotics but also nurtures a community that values sustainability, collaboration, and education.

Title Sponsors
Our Partners:







