

Autonomous Underwater Vehicle
Meet Douglas
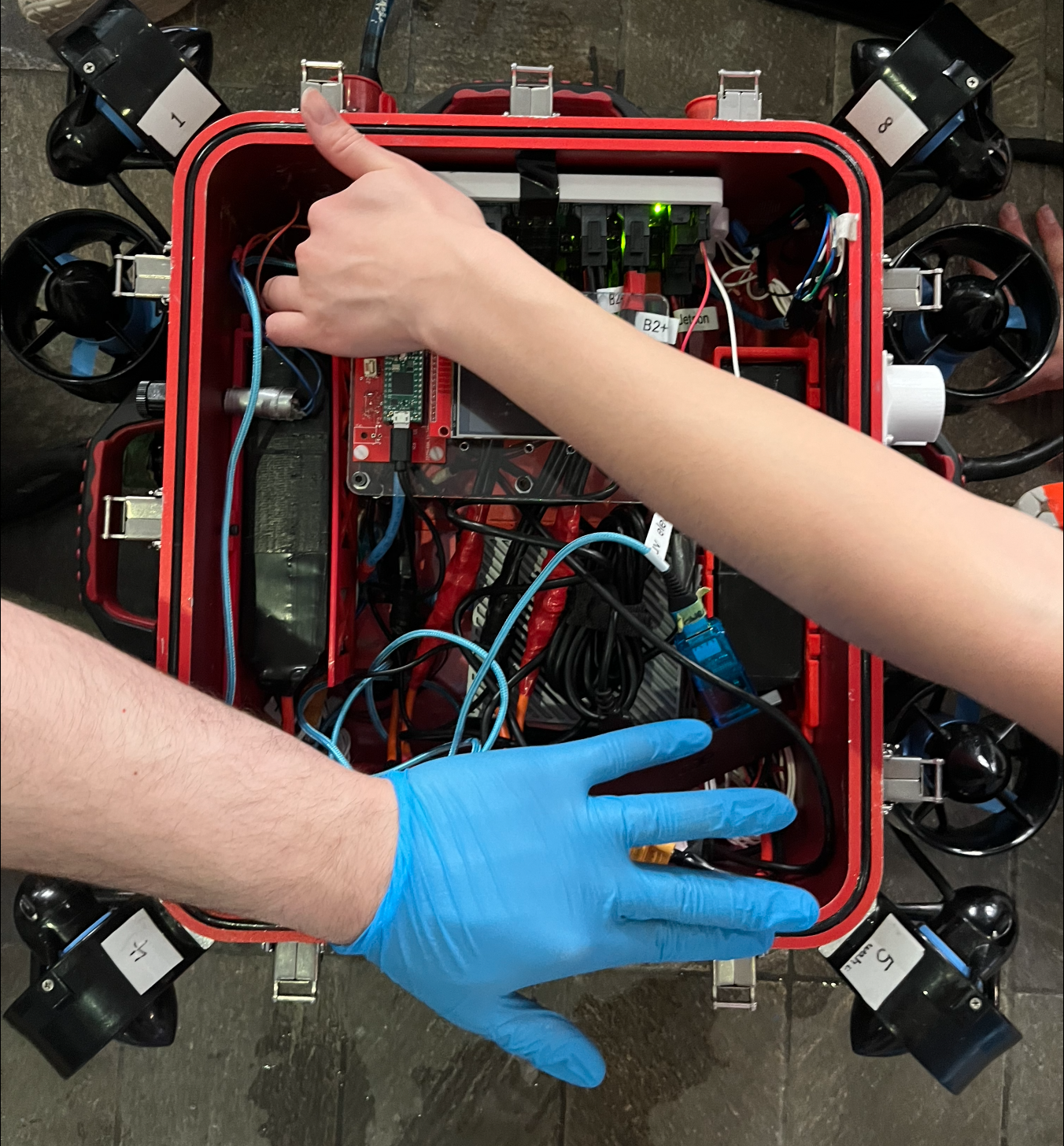
The McGill Robotics Autonomous Underwater Vehicle (AUV) Team proudly presents Douglas, the latest evolution of our AUV team, developed during the 2023–2026 scholastic years. Building on a proven hull design, Douglas features a significantly upgraded mechanical system, including a lighter, more modular chassis, a refined grabber mechanism, and a brand-new torpedo launch system. Our electrical team has reimagined the internal architecture with a strong focus on safety and maintainability, introducing updated revisions of our power distribution board, a custom actuator board, and an intuitive touchscreen display. On the software side, Douglas showcases enhanced autonomy through advanced navigation algorithms, AI-powered computer vision, and a realistic simulation environment that enables extensive testing before deployment. Together, these innovations mark a major leap forward in performance, resilience, and underwater mission capability.
Meet Our Team
Our dedicated team of interdisciplinary McGill students have worked tirelessly to bring Douglas to life, our Autonomous Underwater Vehicle (AUV) representing us at this year’s RoboSub competition. Spanning three different sub-divisions of Mechanical, Electrical, and Software, over 70 students bonded together to develop and design Douglas. Their commitment and excellence truly showcase the best of McGill’s student talent.

74
Members
1st in Design Presentation at RoboSub 2025
8
Leads and PMs
RoboSub 2026 Team Introduction Video
Douglas
at a Glance

Propulsion
6 DOF (Surge, Sway, Heave, Roll, Pitch, Yaw)
T-200 Blue Robotics Thrusters 4.1kgf @ 16V (x8)
Blue Robotics Basic ESC (x8)
Hull and Chassis
Custom Aluminum Milled Hull
In-house machined and bent aluminum chassis
Custom Milled Blue Robotics Foam
Power System
Custom Power PCB
2 x 14.8V 10000mAH BlueRobotics LiPo Battery
Actuation System
Custom actuator PCB
Custom torpedo launching module
Custom grabber arm
Blue Trail Engineering SER-2010
Safety System
Custom thruster kill switch (reed switch)
Blue Robotics BR-100433 system kill switch
Automatic undervoltage and overcurrent detection
Computing Module
NVIDIA Jetson AGX Orin DevKit
Teensy 4.0 MCU
STM32 Nucleo-64
Python, C, C++
Navigation Stack
Movella Xsense MTi-630 IMU
Water Linked A50 DVL
Bar30 Blue Robotics Pressure Sensor
ZED 2i Stereo Camera (front facing)
ELP USB500W02M (down facing)
Teledyne TC4013 Hydrophone with custom PCB
Machine Learning
PyTorch
ZED SDK
RF-DETR
OpenCV
Software Stack
Robotics Operating System (ROS2) Humble
Ubuntu 22.04 LTS, JetPack 6.2
Python, C, C++
SLAM


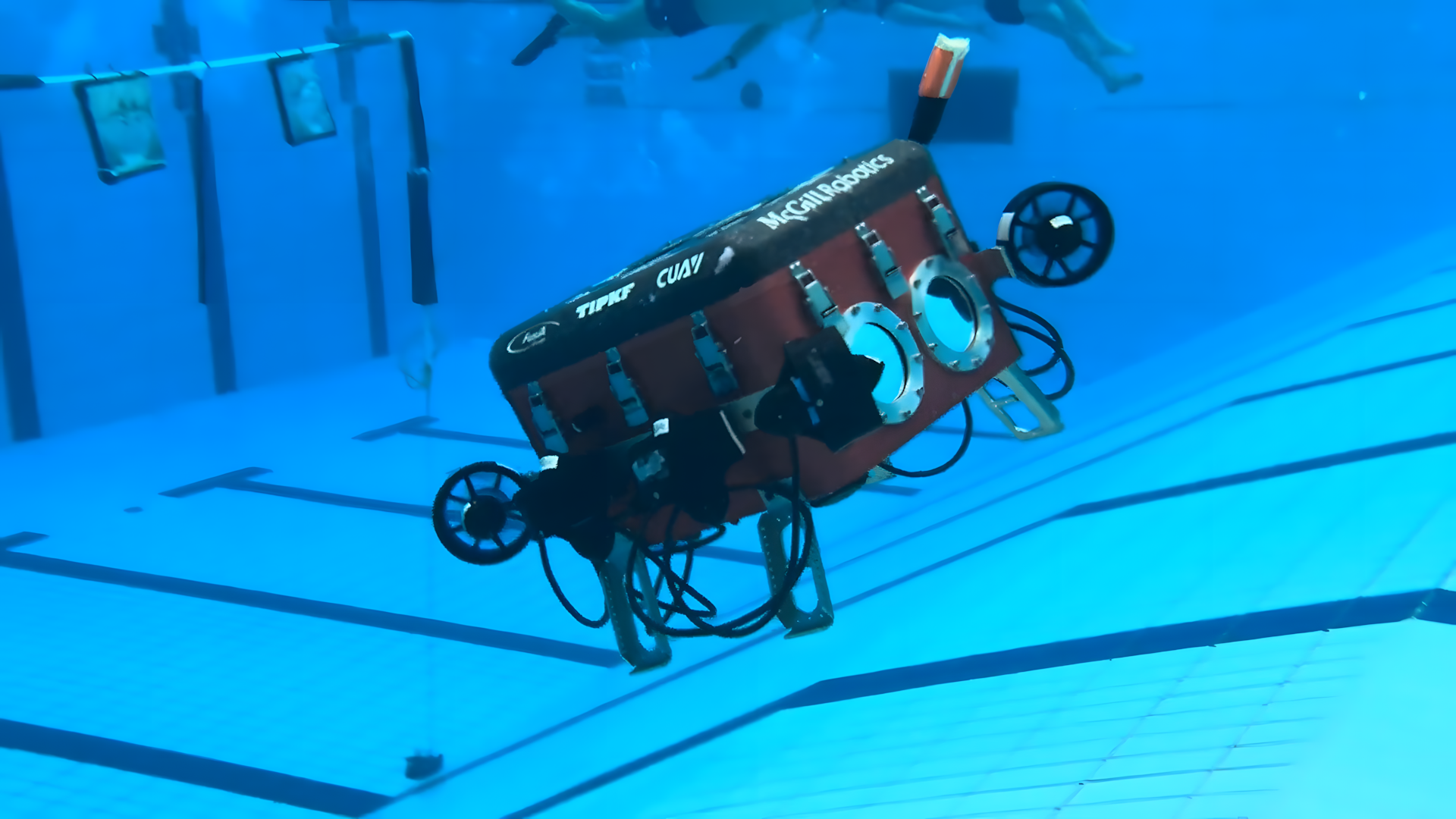


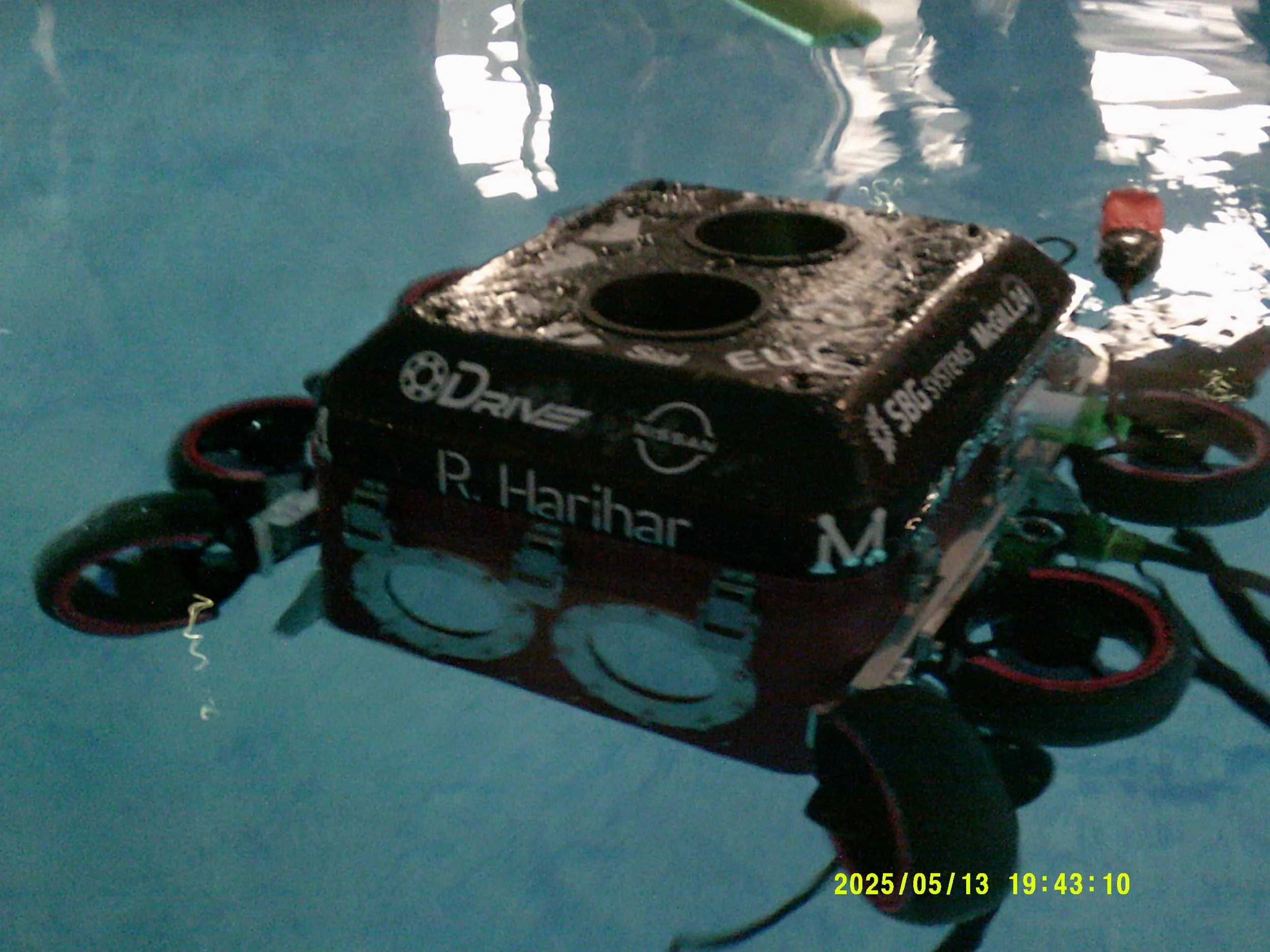


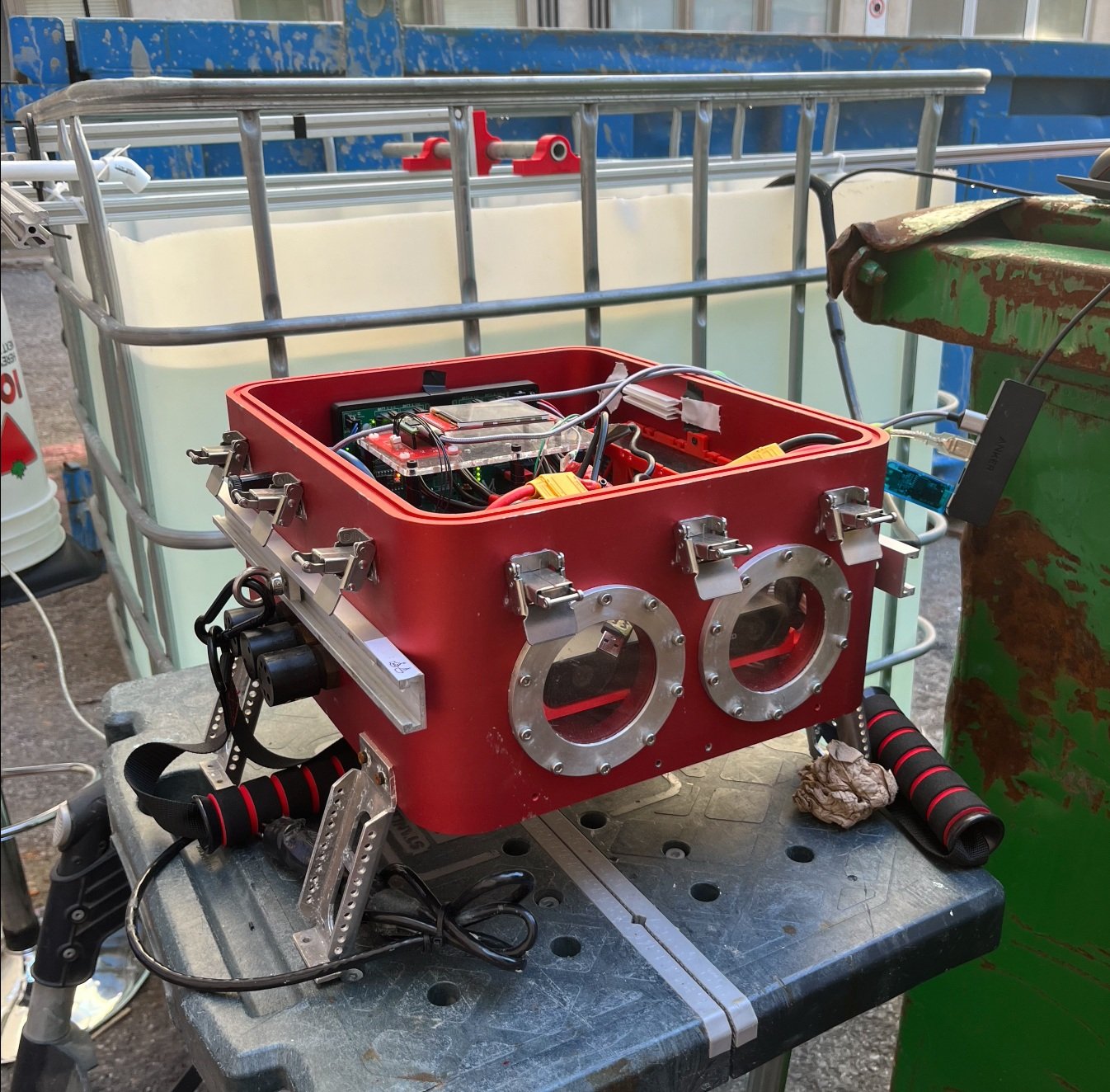


Mechanical Design.
Douglas features a mechanical hull designed and manufactured during the 2023-2024 scholastic year. During the 2024-2025 year the subteam has made an entirely new chassis, grabber and torpedo system. In the 2025-2026 year, our mechanical team’s main design goals this year were to improve internal orgaisation, finish the torpedo systems and improve the reliability of the grabber actuator.

Electrical Architecture.
Douglas has custom designed PCBs for distributing power, displaying system information on a touch screen, navigation using three hydrophones, and manipulating the grabber and torpedo.

Software Stack.
Our ROS-centric software stack runs in Docker on an NVIDIA Jetson AGX Orin, uniting vision, state estimation, mission planning, PID-based controls, and a Unity simulation to drive the Douglas AUV. This year we emphasized rigorous real-world testing and standardized procedures to boost reliability across the modular sense–plan–act–sim pipeline.
Meet the 2025-2026 AUV Executive Team
-
![]()
Caileigh Bates
PROJECT MANAGER
-
![]()
John-Paul Chouery
PROJECT MANAGER
-
![Kayra Gedik]()
Kayra Gedik
MECHANICAL LEAD
-
![Nadim Asmar]()
Nadim Asmar
MECHANICAL LEAD
-
![]()
Raina Hu
SOFTWARE LEAD
-
![Albert Wang]()
Albert Wang
SOFTWARE LEAD
-
![Yau Chau]()
Yau Chau
ELECTRICAL LEAD
-
![Anna Joy Aylward Burgess]()
Anna Joy Aylward Burgess
ELECTRICAL LEAD
-
![]()
Celina Belleville
ADVISOR









Building Robots For A Sustainable Future
In partnership with McGill’s Sustainability Projects Fund, McGill Robotics is developing robots to assist researchers in large-scale environmental studies, from tracking deer populations to monitoring invasive aquatic species, making comprehensive data collection and analysis more feasible.
Community & Outreach @ McGill Robotics
McGill Robotics mission is to inspire students to build robots and to build robots that inspire students. We believe it is important to give back to the community which is why we are an organization that advances the field of robotics but also nurtures a community that values sustainability, collaboration, and education.

Our Past AUVs
-

ASIMOV
2013 - 2014
-

BRADBURY
2015 - 2017
-

CLARKE
2018 - 2023
Title Sponsors
Our Partners:







